
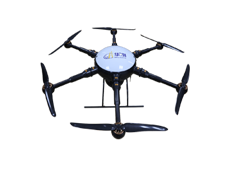
華測P560H六旋翼無人機

P560H六旋翼無人機航拍測繪系統,采用高強度全碳纖維材質,機身設計新穎、輕巧,體積小、重量輕、飛行平穩、機動靈活、空中阻力小、目標特性小、飛行噪音低等特點,非常適合城鎮夜間,環境比較惡的環境,人員密集場所飛行。
P560H 六旋翼無人機
P560H六旋翼無人機航拍測繪系統,采用高強度全碳纖維材質,機身設計新穎、輕巧,體積小、重量輕、飛行平穩、機動靈活、空中阻力小、目標特性小、飛行噪音低等特點,非常適合城鎮夜間,環境比較惡的環境,人員密集場所飛行。
P560H六旋翼無人機航拍測繪系統使用快捷方便,不太需要過多的技術訓練就可以進行簡單,穩定的飛行,甚至可實現“單兵作戰”——即單人操作。在地質探測、遙感測繪、通訊中繼、環境保護、氣象探測、災害監測、航測、線路、管道巡檢,城市巡查,空中指揮支援,群體事件控制等方面有著廣泛的應用。
(一)機體:P560H六旋翼無人機航拍測繪系統的機身采用質量輕,強度高的碳纖維制成,機身連接部件全部采用7050鋁合金CNC制成,實現可以快拆、方便攜帶,在最大限度的減輕了機身重量的同時,保證了機身的結構強度。飛機整體可防≧IP64降雨,可以保證其在雨天情況下正常工作。經多次測試,P560H六旋翼無人機航拍測繪系統在正常作業高度,速度摔落后,高強度,高韌性的機體完全不會出現變形,斷裂等損毀情況。高強度的機身更能保證機載設備安全、可靠地運行,為您更加安全的工程應用,奠定了堅實的基礎。
(二)動力系統:P560H六旋翼無人機航拍測繪系統的動力系統由防水無刷電機、防水無刷控制器和螺旋槳組成:
無刷電機采用定制化、高效率盤式無刷電機,動力輸出強勁,功耗低,振動小且具有防水能力,保障無人機的可靠性。可在高速狀態下長時間工作。
無刷控制器采用了防水型高速調速器,具有調速迅速,發熱量低及防水防塵的功能,保障無人機處于惡劣環境中的正常工作。
螺旋槳采用的是優質29寸碳纖維空心螺旋槳,高強度復合材料,同等高轉速下,產生的升力越大。
(三)飛控系統:飛控系統分為主控部分和定位系統部分及數據傳輸部分:
(1)主控部分采用MP-201M飛控,該飛控集成高精度RTK差分系統,可以保障在測繪行業高精度的數據記錄工作,且主控設備艙具有恒溫功能,保障在超低溫環境中,主控的正常工作能力,設備艙采用了屏蔽接地措施,以避免受外界干擾。
該飛控具備的功能有:
1)自穩飛行(飛控輔助平衡功能,簡化飛手操作難度);
2)GPS定點飛行(使用GPS定位功能,進一步簡化操作難度,保障無人機在惡劣環境下的飛行性能);
3)地面站導航功能(可以通過數據傳輸設備,在地面基站設定所需要的航線及飛行高度,飛行速度,由飛控自主起飛并按設定規劃的航線自主飛行,飛行結束后飛機依據設置可自動返回起飛點降落或在最終飛行航點自行降落及懸停等待命令);
4)失控返航功能(在無人機失去控制信號后,無人機會自動返回起飛點并自主降落或手動降落);
5)返航功能(當無人機飛出視線或任務完成,需要回航時,該功能可以自主返回起飛點并降落);
6)黑匣子功能(用于無人機每次飛行時飛控的工作狀態、電池性能、地面基站所發出的每步指令及遙控器發出的每步指令的記錄,便于后期分析)。
以上功能為該飛控常規功能,但不局限于以上六項。
(2)P560H六旋翼無人機航拍測繪系統采用的是目前最先進的定位系統;該定位模塊具有同時采集GPS信號及高精度RTK數據,且采用雙定位系統,具有同主控雙處理器功能一樣,在其中一個定位模塊發生故障后,立即自主轉換至備用模塊進行工作。
行業應用方向
三維數據可視化已成為當今城市基礎建設、規劃、環境保護、交通和通訊等方面的重要環節,是當前數字城市的重要表現手段,也是當今智慧城市發展的重要基礎數據設施。
項目應用案例
以上海西虹橋北斗產業園為例,運用五鏡頭傾斜攝影吊艙快速采集信息構建三維模型。
項目實施方法
1.低空影像采集設計方案
本攝區采用P560H旋翼飛機搭載五鏡頭吊艙,設計航高150米,前向重疊度為80 %,側向重疊為70 %,相機焦距20mm,總像素大于1億
控制點采集
影像處理
2.城市三維建模構建
通過攝影測量同時獲取的DEM和 DOM構建三維模型和采用地形數據內插DEM與攝影測量生產的 DOM疊合構建三維模型,并與相關專題數據合成的技術流程
3.基于無人機影像的城市三維集成技術流程
這里,我們選擇Context Capture來搭建和展示整個三維場景,步驟如下:
建模對象:靜態物體
輔助信息:傳感器屬性、照片位置姿態參數、控制點等等
計算過程:空三、重建階段的參數設置
輸出結果:帶有真實紋理的三維格網模型(實景真三維模型)
三維模型展示

三維模型流程

結論
利用 0.2m無人機高分辨率影像數據,基于Context Capture Setting任務序列設置生產需要的空三,采用 Context Capture SceneComposer編輯場景,獲取了該區域地表三維模型,為基于無人機快速建立三維地表模型積累寶貴經驗。
Context Capture平臺支持下,基于多張傾斜攝影的無人機影像自動提取建筑物表面紋理,從而避免大量的實地考察工作量,降低工作強度,提高作業效率,更重要的是實現建筑物三維重建的真實紋理。
地面站系統:

地面站參數:
地面站外形尺寸:520*440*200mm
內置電池:3S1P10000毫安時
工作時間:8小時以上
地面站介紹:
數據傳輸模塊及地面一體基站,具有防水、防震、防高低溫,方便攜帶等。采用900MHz模塊及工程級地面基站。數傳模塊具有跳頻技術,最大限度的避免同頻干擾。該模塊的有效傳輸距離為:城市為10KM;野外空曠區域為20KM。地面基站的功能具有視訊接收及監視功能,航線規劃功能,無人機當前點定位功能。地面站支持外場汽車充電、支持室內平衡充充電。
機體技術參數:
P560H
機體
對稱電機軸距
1550mm
單臂長度
820mm
機身直徑
550mm
起落架尺寸
跨距630mm 高度400mm
電機
定子尺寸
81mm
KV值
KV170
最大功率
1800W/軸
電調
工作電流
80A
工作電壓
25V
驅動PWM頻率
600Hz
螺旋槳
材質
碳纖維
尺寸
29英寸
飛行參數
起飛重量
20kg
有效載荷
10kg
圖傳模塊
標清圖傳(可選配高清圖傳)
飛行時間
空載70分鐘,標準載荷50分鐘
遙控距離
3-5公里(最遠10公里)
飛行高度
5000m
抗風能力
6級
電池電量
22.2V 22000mAh
工作溫度
-20℃至40℃
更多相關
華測P560H六旋翼無人機
P560H六旋翼無人機航拍測繪系統,采用高強度全碳纖維材質,機身設計新穎、輕巧,體積小、重量輕、飛行平穩、機動靈活、空中阻力小、目標特性小、飛行噪音低等特點,非常適合城鎮夜間,...

華測多旋翼P520V測繪無人機
華測P520V/P540V六旋翼無人機航拍測繪系統,采用高強度全碳纖維材質,機身設計新穎、輕巧,體積小、重量輕、飛行平穩、機動靈活、...

華測多旋翼P500無人機航拍系統
華測P500四旋翼無人機航拍系統采用超穩定懸停、全自動控制無人機測控系統。其機身采用特種材料,設計新穎、輕巧、支持北斗高精度定位。具有...

華測固定翼P700E測繪無人機
華測P700E航測無人機系統,是華測公司自主研發生產的一套電動固定翼無人機系統,采用軍工一體化生產技術,上單翼V尾布局,使用雙發電動引擎,有效載荷大...

華測固定翼P610無人機航拍測繪系統
P610型遙感無人機經過多年的研發與完善,在實踐中總結技術與經驗,經過多個項目的驗證,最終達到性能上的提升與經驗上的積累;經驗豐富的技術人員可以提...

華測固定翼P310測繪無人機
華鷂P310是華測新研發的復合翼垂直起降無人機,采用固定翼結合四旋翼的復合翼布局形式,以簡單可靠的方式解決了固定翼無人機垂直起降的難題...

華測固定翼EBEE無人機航拍系統
EBEE無人機航拍測繪系統是目前市面上最容易操作的全自動迷你型無人機測繪系統,機身采用模塊化設計,所有部件可以拆卸放入一個小的儀器箱內,單人操作,簡便靈活,可以幫助任何無航飛...
 環球測繪微信
環球測繪微信